Соотнесите : А) компас Б) электрометр В) электродвигатель 1)взаимодействие постоянных магнитов 2)возникновение электрического тока под действием переменного магнитного поля 3) электризация тел 4) взаимодействие наэлектризованных тел 5)действие магнитного поля на проводник с током А) Закон о передаче давления жидкостям и газам Б) закон всемирного тяготения В) закон упругой деформации 1)Б.
Торричелли 3)Архимед 4)Р Гук 5)И.
Вы находитесь на странице вопроса Соотнесите : А) компас Б) электрометр В) электродвигатель 1)взаимодействие постоянных магнитов 2)возникновение электрического тока под действием переменного магнитного поля 3) электризация тел 4) взаи? из категории Физика.
Уровень сложности вопроса рассчитан на учащихся 5 – 9 классов. На странице
можно узнать правильный ответ, сверить его со своим вариантом и обсудить
возможные версии с другими пользователями сайта посредством обратной связи.
Если ответ вызывает сомнения или покажется вам неполным, для проверки
найдите ответы на аналогичные вопросы по теме в этой же категории, или создайте
новый вопрос, используя ключевые слова: введите вопрос в поисковую строку,
нажав кнопку в верхней части страницы.
Принцип
действия магнитного компаса основан
на свойстве магнитной стрелки
устанавливаться по направлению магнитных
силовых линий поля Земли. Магнитный
компас измеряет магнитный курс (МК), т.
е. угол между направлением горизонтальной
составляющей магнитного поля Земли и
проекций продольной оси летательного
аппарата на горизонтальную плоскость.
Основными элементами
магнитного компаса являются (рис.4):
подвижная система (картушка), включающая
магниты 3, поплавок 2, лимб 1 (шкалу) и
шпильку 10; котелок 5 с жидкостью 6; колонка
7 с подпятником 9. Лимб картушки
разградуирован на 360°. Вес картушки
благодаря поплавку 2 ,уменьшен настолько,
что давление шпильки 10 на подпятник 9
незначительно, что способствует
уменьшению трения.
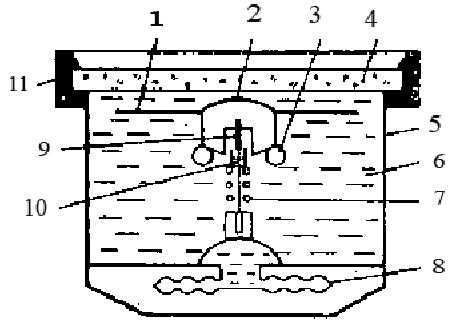
Рис.14.4.
Схема магнитного компаса: 1—лимб
картушки; 2—поплавок;
3— магниты; 4—стекло;
5—котелок;6— жидкость; 7—колонка; 8
мембранная коробка; 9— подпятник;
10—шпилька;11—курсовая черта.
К поплавку
прикрепляется одна или несколько пар
постоянных магнитов, направленных
одноименными полюсами в одну сторону.
Оси магнитов параллельны линии 0—180°
лимба. Мембранная коробка в нижней части
котелка служит для компенсации изменения
объема жидкости при изменении температуры.
В качестве жидкости используется
лигроин.
Картушка
компаса, будучи выведенной из состояния
покоя, совершает колебания. Для оценки
этих колебаний составим уравнение
движения картушки. На картушку действуют
момент инерционных сил J
, момент сил вязкого сопротивления k,
устанавливающий момент от взаимодействия
постоянных магнитов с магнитным полем
Земли MH*sin(),
момент сухого трения шпильки о подпятник
Мтр и возмущающий момент Мм, вызванный
влиянием посторонних магнитных полей.
Сумма этих моментов равна нулю или
J
+ k
+
MHsin()=Мм
Мтр,
(14.1)
где
J—
момент инерции картушек;
M=2ml—магнитный
момент картушки (m—магнитная
масса полюсов, 2l—расстояние
между полюсами);
Для
небольших углов отклонения
()<30 можно
можно
принять sin()=.
Тогда уравнение (1) примет вид
+2d +
+
 (
( )
)
 ,
,
(14.2)
где
 ‒
‒
собственная частота незатухающих
колебаний компаса;
 погрешность
погрешность
магнитного компаса, обусловленная
влиянием посторонних магнитных полей.
Если
даже отсутствуют все другие погрешности
магнитного компаса, то наличие момента
трения Мтр
обусловливает застой компаса, величина
которого
Для
уменьшения застоя необходимо уменьшать
трение шпильки о подпятник и увеличивать
магнитный момент М
постоянных магнитов. Уменьшение трения
достигается увеличением плавучести
картушки и выбором в качестве подпятника
твердого камня (агат, рубин, сапфир и,
др.). Величина момента трения Мтр
зависит также от поведения подвижной
системы компаса. При работе компаса на
самолете корпус прибора подвергается
колебаниям, которые передаются на
подпятник. Колебания подпятника
способствуют уменьшению момента трения
Мтр,
поэтому застой компаса на самолете
значительно меньше, чем на неподвижном
основании. Застой в современных компасах
меньше 1°, поэтому при рассмотрении
динамических характеристик компаса
будем им пренебрегать.
В
зависимости от величины относительного
коэффициента затухания d
движения
картушки могут быть затухающими (при
d<1)
или апериодическими (при d>1).
В целях получения минимального времени
успокоения компаса обычно выбирают d=
0,7
0,8. Выбор собственной частоты
 обусловливают
обусловливают
требуемым временем успокоения, причем
Обычно
время успокоения составляет 15—30 сек.
Это время можно уменьшить путем увеличения
магнитного момента М.
Важной
характеристикой компаса является
увлечение,
под которым
подразумевают угол
 ,
,
на который жидкость увлекает картушку
при повороте компаса на 360°. Это явление
наблюдается при развороте самолета.
Величина увлечения в зависимости от
скорости разворота составляет =535°.
=535°.
Таким
образом, можно отметить следующие четыре
динамические характеристики магнитного
компаса: относительный коэффициент
затухания d,
частоту собственных колебаний
 (или
(или
время успокоения ),
),
увлечение и застой
и застой .
.
Магнитные компасы
применяются на самолетах в качестве
дублирующих приборов и используются в
случае выхода из строя других курсовых
приборов.
Общий
вид компаса типа КИ-12 показан на рис.14.5.
Картушка этого прибора имеет вертикальную
шкалу.
На
рис.14.6 приведен чертеж компаса. Картушка
8
с вертикальной шкалой, несущая магниты
12,
с помощью керна 9 опирается на подпятник
10
из камня. Колонка с пружиной 11
прикреплена к пластмассовому корпусу
при помощи гайки с пружинной шайбой.
Шкала
картушки равномерная с ценой деления
5° и оцифровкой через 30°. Оси магнитов
12
параллельны линии С—Ю шкалы. Курсовая
нить шкалы, связанная с корпусом прибора
и отображающая направление продольной
оси самолета, окрашена светящейся
массой.
Компасный
курс самолета отсчитывается по делениям
шкалы против курсовой черты.
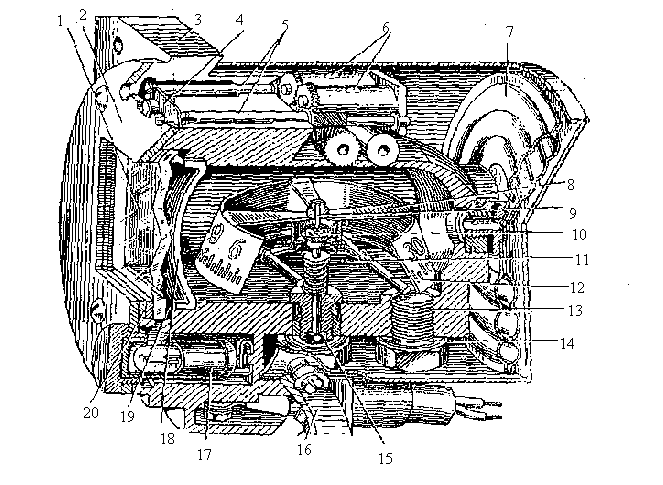
Рис.14.6.
Чертеж магнитного компаса:
1—стекло; 2—крышка;
3—корпус; 4—задвижка; 5—валики; 6—
магниты девиационного прибора;
7—мембранная коробка; 8—картушка;
9—керн; 10— подпятник; 11— колонка с
пружиной; 12—магниты; 13— пробка;
14—прокладка; 15—стойка; 16—планка; 17—
лампочка; 18—курсовая черта; 19—лигроин;
20 — прокладки.
Корпус компаса
заливается лигроином, служащим для
уменьшения веса картушки и увеличения
демпфирования.
Для компенсации
изменения объема жидкости при изменении
температуры применена мембранная
коробка 7, внутренняя полость которой
соединена с внутренней полостью компаса.
Для
заливки, лигроина служит отверстие,
закрываемое пробкой 13, а для обеспечения
герметичности ‒прокладка 14.
Для устранения
полукруговой девиации служит девиационный
прибор, смонтированный в верхней части
компаса. Он состоит из двух удлиненных
валиков 5, которые через червячные
передачи передают вращение двум
продольным и двум поперечным валикам
с запрессованными в них девиационными
магнитами 6. Концы валиков 5 имеют шлиц
под отвертку для поворота при устранении
девиации.
На
крышке 2 имеются отверстия, через которые
можно вращать валики 5. Один из этих
валиков позволяет вращать девиационные
магниты, служащие для устранения девиации
на курсах С—Ю, другой валик:‒для
устранения девиации на курсах В—З.
Для
освещения шкалы компаса служит лампочка
17.
Компас имеет,
следующие характеристики:
Соседние файлы в папке книга посл.редакция
Принцип действия и устройство измерителя курса
Магнитные компасы
Простейшим
устройством для определения направления
магнитного меридиана Земли является
магнитная стрелка.
Принцип
действия
магнитного компаса основан на
взаимодействии магнитного поля магнитной
стрелки компаса с магнитным полем Земли.
Направление
магнитного меридиана задается
горизонтальной составляющей Н
вектора
напряженности Т
магнитного поля Земли (рис.
12.3, а).
Угол θ
называется
магнитным наклонением. Угол между
направлениями географического меридиана
NS
и
Н
(рис.
12.3,6)
называется магнитным склонением δ
Величина и знак δ
необходимые
для перехода к истинному курсу,
определяются по специальным картам.
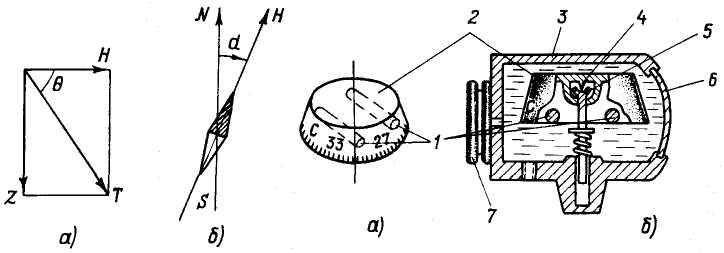
авиационных недистанционных
магнитных компасах типаКИ-13
(рис. 12.3)
роль магнитной стрелки выполняют два
цилиндрических постоянных магнита 1,
образующие
вместе с лимбом 2,
на котором они закреплены, подвижную
систему, называемую картушкой. Картушка,
показанная отдельно на рис.
12.3,а, имеет
шпиль 4,
который опирается на амортизированный
подпятник (топку) 5.
Герметический корпус 3
компаса заполнен жидкостью (лигроином),
благодаря чему обеспечивается
демпфирование колебаний картушки и
уменьшение трения в опоре вследствие
частичного взвешивания картушки. Для
компенсации температурных изменений
объема жидкости служит мембранная
камера
7. На
лицевом стекле 6
имеется вертикальная черта для отсчета
курса по шкале картушки.
Рис. 12.3. Конструкция магнитного компаса
КИ-13
ругим примером устройств
для измерения магнитного курса являются
датчики сигналов магнитного курса типаПДК-45
(жидкостные и ПДК-3
(“сухие”),
применяемые в гиромагнитных дистанционных
компасах.
Их
подвижная магнитная система принципиально
подобна рассмотренной на рис.
12.3.
Сигналы курса выдаются неподвижным
потенциометром, щетки которого закреплены
на оси подвижной системы.
Всем
рассмотренным компасам свойственны
значительные погрешности из-за трения
в опорах оси подвижной магнитной системы.
Кроме того, при разворотах самолета
возникают ошибки увлечения, поскольку
начинающая вращаться при этом жидкость
отклоняет ось магнитов от направления
вектора Н.
В датчиках
ПДК-3
увлечение вызывается электромагнитным
демпфером и трением в опорах.
От указанных
погрешностей свободны индукционные
датчики магнитного курса
Индукционные компасы
Принцип
действия
индукционного компаса основан на
наведении магнитным полем Земли
злектродвижущей силы в дросселе с
пермалоевым сердечником. Магнитная
проницаемость которого периодичеси
изменяется с помощью переменного
магнитного поля.
Индукционный
метод определения направления магнитного
поля земли позволяет обойтись без
картушки с ее магнитной системой. Для
пояснения идеи индукционного метода
рассмотрим индукционный элемент (рис.
12. 4),
состоящий из двух пермаллоевых стержней
1,
на которые намотаны подмагничивающая
обмотка 2
и
сигнальная обмотка 3.
Подмагничивающие
обмотки охватывают каждый стержень и
соединены последовательно, а сигнальная
обмотка охватывает оба стержня. Если
стержни находятся в горизонтальн

ой плоскости, то горизонтальная
составляющая поля землиН
будет
создавать в стержнях магнитный поток
Ф,
величина которого зависит от положения
осей стержней по отношению к вектору
напряженности магнитного поля земли.
Поток Ф,
постоянный по
величине, не может наводить э. д. с. в
сигнальной обмотке 3.
Для того
чтобы поток Ф
наводил в сигнальной обмотке
пропорциональную ему э. д. с, необходимо
осуществить измен
Рис. 12. 4.
Схема индукционного
элемента:
1
– стержень
из пермаллоя; 2
– подмагни-чивающая обмотка; 3
– сигнальная
обмотка
2
f
400
Гц
чевидно, потокФ
также будет меняться с двойной частотой.
Магнитные потоки, создаваемые
подмагничивающими обмотками 2
в стержнях
1,
противоположны
по направлению, а индуктируемые ими в
сигнальной обмотке э. д. с, равные по
величине и обратные по знаку, взаимно
компенсируются. Магнитный поток
Ф,
обусловленный магнитным полем земли,
будет модулироваться с частотой 2f,
что приведет к появлению в сигнальной
обмотке э. д. с. той же частоты 2f.
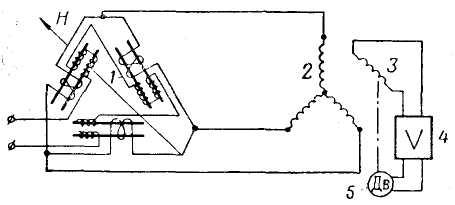
Рис. 12. 5. Принципиальная схема
индукционного компаса:
1
– чувствительный элемент; 2
– статор
сельсина; 3
– ротор сельсина; 4
– усилитель; 5
–
двигатель
арис.
12. 5
приведена принципиальная электрическая
схема индукционного компаса. Чувствительный
элемент компаса состоит из трех пар
пермаллоевых стержней, расположенных
под углами 60°
друг к другу. Намагничивающие обмотки
намотаны на каждый стержень и соединены
последовательно, а сигнальные обмотки
охватывают оба стержня, соединены в
треугольник и связаны тремя проводами
со статорными обмотками 2
сельсина-приемника.
В однофазной роторной обмотке
3
сельсина
наводится э. д. с. частотой 800
Гц,
зависящая
от положения датчика по отношению к
направлению магнитных силовых линий
поля земли. Если ось обмотки ротора
сельсина совпадает с направлением
магнитного поля, то э. д. с. будет
отсутствовать.
Наводимая
в обмотке ротора сельсина э. д. с.
усиливается в усилителе 4
и
подается в двигатель 5,
который
поворачивает ротор в такое положение,
чтобы э. д. с. равнялась нулю.
Датчик
индукционного компаса (рис.
12. 6)
включает чувствительный элемент,
платформу, поплавок, карданов подвес и
девиационный прибор. Внутренняя полость
датчика заполнена жидкостью (75%
лигроина и 25%
масла
МВП).
Чувствительный
элемент состоит из трех магнитных
зондов, расположенных по сторонам
равностороннего треугольника. Каждый
магнитный зонд имеет два пермаллоевых
сердечника 1,
помещенных в подмагничивающие катушки
2.
Сигнальная
катушка 3
охватывает
стержни и подмагничивающие обмотки.
Чувствительный
элемент закреплен на пластмассовой
платформе 4.
Вывод
проводов от чувствительного элемента
осуществляется через полую ось 6.
Платформа
4
и
поплавок 8
крепятся
к основанию 5,
являющемуся
внутренним кольцом карданова подвеса
и поворачивающемуся на полых осях 6.
Наружное
кольцо карданова подвеса 11
на
своих осях 13
поворачивается
внутри корпуса 12.
Поплавок
вместе с чувствительным элементом
находится в жидкости во взвешенном
состоянии, которое достигается за счет
подгонки веса груза 15,
закрепленного
на платформе 4.
При кренах самолета до 17°
чувствительный элемент благодаря
карданову подвесу остается горизонтальным.
Жидкость служит также для демпфирования
колебаний поплавка (и чувствительного
элемента).
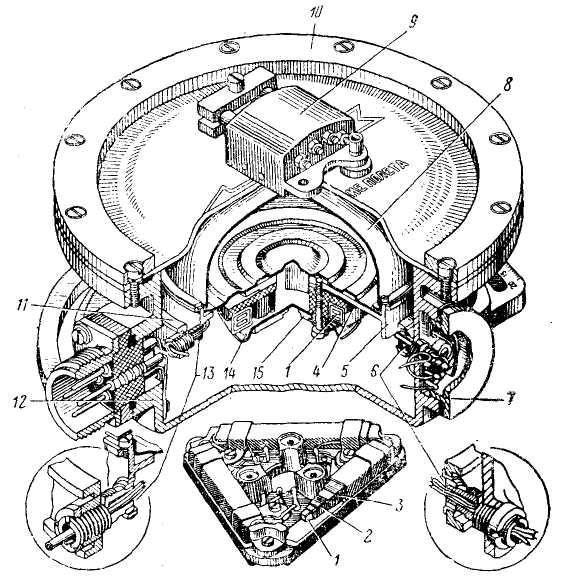
Рис.
12. 6. Конструкция индукционного датчика
ИД:
1
–
сердечник чувствительного элемента; 2
–
катушка намагничивания;
3
– сигнальная катушка; 4
– пластмассовая платформа чувствительных
элементов; 5
– внутреннее
кольцо карданова подвеса; 6
– полая
ось карданова подвеса; 7
–
пробка; 8
– поплавок;
9
– девиационный
прибор; 10
– зажимное кольцо; 11
– наружное кольцо карданоза подвеса;
12
– корпус
датчика; 13
– полая
ось карданова подвеса; 14
– чашка;
15
– груз
Для
устранения полукруговой девиации
применяют девиационный прибор 9,
по
устройству подобный девиационному
прибору недистанционного магнитного
компаса.
Сигналы
индукционного датчика по трехпроводной
линии поступают на сельсин-приемник.
Индукционные компасы обычно применяются
в сочетании с гирополукомпасами, являясь
для последних корректирующими устройствами
в азимуте.

Тема 9. МАГНИТНОЕ ПОЛЕ.
9.1. Магнитные взаимодействия. 9.2. 3акон Био-Савара-Лапласа.
9.3. Магнитное поле движущегося заряда.
9.4. Напряженность магнитного поля.
9.5. Магнитное поле прямого тока.
9.6. Магнитное поле кругового тока.
9.7. Теорема Гаусса для вектора магнитной индукции
Магнитные свойства постоянных магнитов, их способность притягивать железные предметы были известны еще древним грекам. Земля также является магнитом, и явления земного магнетизма были использованы древними китайцами для создания компаса, т. е. свободно вращающейся магнитной стрелки, указывающей ориентацию сторон света. Китайские мореплаватели использовали компас в 11 веке, в Европе подобные устройства появились лишь в 12 веке. Предполагается, что приборы наподобие компаса использовались китайцами 3000 лет тому назад.
пространственамагниченные теламагнитное поле
Помещенная в это поле маленькая магнитная стрелка устанавливается в каждой его точке вполне определенным образом, указывая тем самым направление поля. Тот конец стрелки, который в магнитном поле Земли указывает на север, называется , а противоположный – .
Хорошо известно, что, если поднести два магнита друг к другу, между ними действует сила. Магниты либо притягивают друг друга, либо отталкивают; их взаимодействие ощущается даже тогда, когда магниты не соприкасаются. Если к северному полюсу одного магнита поднести северный полюс другого, магниты будут отталкиваться; то же самое будет, если поднести магниты друг к другу южными полюсами. Но если к северному полюсу одного магнита поднести южный полюс другого, возникает притяжение. Это напоминает взаимодействие электрических зарядов: одноименные полюса отталкиваются, а разноименные притягиваются. Но не следует смешивать полюса магнитов и электрические заряды: это совсем разные вещи.
Вернемся к примеру с магнитной стрелкой, помещенной в магнитное поле. При отклонении стрелки от направления магнитного поля на стрелку действует механический крутящий момент пропорциональный синусу угла отклонения и стремящиеся повернуть ее вдоль указанного направления. Как мы видим, взаимодействие постоянных магнитов сходно с взаимодействием электрических диполей, испытывающих в однородном электрическом поле результирующий момент сил, но не силу! Подобно электрическому диполю, постоянный магнит в однородном поле стремится повернуться по полю, но не перемещаться в нем. Опять обнаруживается сходство между электрическими зарядами и магнитными полюсами!
Существенное отличие постоянных магнитов от электрических диполей заключается в следующем. Электрический диполь всегда состоит из зарядов, равных по величине и противоположных по знаку. Эти заряды можно отделить друг от друга и расположить на отдельных телах, например, разрезав диполь пополам по плоскости, перпендикулярной оси диполя. Постоянный же магнит, будучи разрезан таким образом пополам, превращается в два меньших магнита, каждый из которых имеет и
северный и южный полюса. Никакое деление не дает возможности получить отдельно источники северного и южного магнетизма – . Причина состоит в том, что «магнитных зарядов» (или как иногда говорят, «магнитных масс») в природе не существует.
Подводя итоги сведениям о магнетизме, накопленным к 1600г., английский ученый, физик Уильям Гильберт в шеститомном труде «о магните», высказал мнение, что, несмотря на некоторое внешнее сходство, природа электрических и магнитных явлений различна. Действительно, кроме вышеуказанного отличия, опыт показывает, что, если расположить вблизи магнитной стрелки компаса легкий заряженный шарик, то мы не обнаружим никакого действия со стороны заряда шарика на магнитную стрелку. В свою очередь магнитное поле стрелки никак не действует на заряженный шарик. Все же к середине XVIII века окрепло убеждение о наличии тесной связи между электрическими и магнитными явлениями. Однако природа этой тесной связи тогда установлена быть не могла из-за отсутствия достаточно мощных источников тока.
1820 году Эрстед открыл явление отклонения магнитной стрелки гальваническим током и тем самым сделал первый существенный шаг в выяснении характера связи электрических и магнитных явлений. Затем Гей-Люссак и Араго наблюдали намагничивание железа постоянным током, идущим в проводнике. Ампер обнаружил притяжение между проводами, по которым проходят параллельные токи, и отталкивание между противоположно направленными токами. Им же была выдвинута гипотеза о том, что свойства постоянных магнитов обусловлены циркулирующими в их толще постоянными круговыми токами (молекулярными токами).
Но вернемся к открытию Эрстеда. Эрстед помещал магнитную стрелку в непосредственной близости от проводника с током и обнаружил, что при протекании по проводнику тока, стрелка отклоняется; после выключения тока стрелка возвращается в исходное положение.
Из описанного опыта Эрстед делает вывод: вокруг прямолинейного проводника с током есть магнитное поле. Он обратил внимание также на то, что при изменении направления тока в проводнике северный конец стрелки поворачивается в другую сторону.
дальнейшем исследовалось действие на магнитную стрелку проводников с током самой различной формы. Был сделан общий вывод: вокруг всякого проводника с током есть магнитное поле.
Но ведь ток – это направленное движение зарядов. Возможно, вокруг всякого движущегося заряда существует магнитное поле? Опыты подтверждают:
магнитное поле появляется вокруг электронных пучков и вокруг перемещающихся в пространстве заряженных тел.
Итак, вокруг всякого движущегося заряда помимо электрического поля существует еще и магнитное.
магнитное поле – это поле движущихся зарядов. Известно, что обнаруживает себя оно по действию на магнитные стрелки или на проводники с токами, т.е. на движущиеся заряды.
Дальше мы увидим, что подобно электрическому полю, оно обладает энергией и, следовательно, массой. Магнитное поле материально. Теперь можно дать следующее определение магнитного поля: – это материя, связанная с движущимися зарядами, и обнаруживающая себя по действию на магнитные стрелки
движущиеся заряды, помещенные в это поле.
Эрстед изложил результаты своих опытов в письме к Амперу. Ампер, получив письмо от Эрстеда, тут же повторил, описанные им опыты и продолжил их. Он взял
катушку с током и намагниченный металлический стержень (намагниченный) и обнаружил воздействие магнитного поля катушки на стержень. В этом опыте непосредственно была обнаружена связь электрического и естественного магнетизма. Кроме того, Ампер изучил действие магнитного поля на проводники с током.
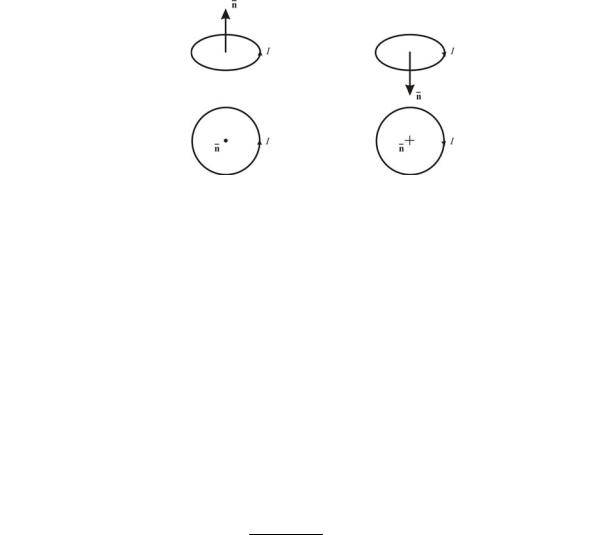
Подобно тому, как для исследования электрического поля используется пробный точечный заряд, для исследования магнитного поля используется точечное магнитное поле, созданное пробным током, циркулирующим в плоском замкнутом контуре очень малых размеров.
Возьмем такой контур с током и поместим его в магнитное поле.
Основное свойство магнитного поля – способность действовать на движущиеся электрические заряды с определенной силой. В магнитном поле контур с током будет ориентироваться определенным образом. Ориентацию контура в пространстве будем характеризовать направлением нормали , связанной с движением тока правилом правого винта или правилом буравчика (Рис. 9.1).
И так, на контур с током в магнитном поле действует вращающий момент. Контур ориентируется в данной точке поля только одним способом. Примем положительное направление нормали за направление магнитного поля в данной точке. Вращающий момент прямо пропорционален величине тока , площади контура , и синуса угла между направлением магнитного поля и нормали .
здесь – вращающий момент или момент силы, = –магнитный момент контура (аналогично = – электрический момент диполя, – плечо диполя.
магнитного поля будет одним и тем же и может служить характеристикой магнитного поля, названной магнитной индукцией:
– вектор магнитной индукции совпадает с нормалью . По аналогии с электрическим полем
Магнитная индукция характеризует силовое действие магнитного поля на ток, аналогично характеризует силовое действие электрического поля на заряд т.е. как и
, – силовая характеристика магнитного поля. можно изобразить, как и с помощью магнитных силовых линий.
– момент силы и , – магнитный момент – характеристики вращательного движения, т.е. магнитное поле – .
Условились, за направление – принимать направление северного конца магнитной стрелки. Силовые линии выходят из северного полюса, а входят соответственно в южный полюс магнита.
Для графического изображения полей удобно пользоваться силовыми линиями
линиями магнитной индукцииЛиниями магнитной индукции называются кривые,
касательные к которым в каждой точке совпадают с направлением вектора в этой точке.
Конфигурацию силовых линий легко установить с помощью мелких железных опилок, которые намагничиваются в исследуемом магнитном поле и ведут себя подобно маленьким магнитным стрелкам (поворачиваются вдоль силовых линий).
Так было установлено, что силовые линии магнитного поля прямолинейного проводника с током – это концентрические окружности с центрами на проводнике, лежащие в плоскости, перпендикулярной проводнику.
Магнитные силовые линии всегда замкнуты (вихревое поле).
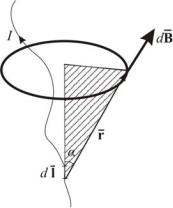
1820г. французские, физики Жан Батист Био и Феликс Савар, провели исследования магнитных полей токов различной формы. Астроном, физик, математик Пьер Лаплас обобщил эти исследования. Лаплас проанализировал данные и понял, что
магнитное поле любого тока может быть вычислено как векторная сумма (суперпозиция) полей, создаваемых отдельными элементарными участками тока:
Это и есть закон Био-Савара-Лапласа, полученный экспериментально.