
Период и частота колебаний
Величины, характеризующие колебательное движение
Изучить колебательное движение нитяного маятника и определить его период и частоту, выяснить как эти характеристики зависят от длины маятника.
Оборудование:
штатив с муфтой и лапкой, шарик с
прикрепленной к нему нитью, линейка с
миллиметровыми делениями, часы с
секундной стрелкой или секундомер.
Математический
маятник – материальная точка, подвешенная
на невесомой и нерастяжимой нити,
находящаяся в поле тяжести Земли.
Математический маятник – это
идеализированная модель, правильно
описывающая реальный маятник лишь при
определенных условиях: длина нити
l много
больше
размеров
подвешенного на ней тела,
масса нити ничтожно
мала по сравнению с массой тела, а
деформации нити настолько малы, что ими
вообще можно пренебречь.
Анализ
свободных колебаний, совершаемых
математическим маятником,
значительно упрощается, если:
1)
силы
трения,
действующие
на тело,
пренебрежительно
малы и поэтому
их можно не учитывать;
2)
будем рассматривать лишь малые колебания
маятника с небольшим углом размаха.
Причинами
свободных колебаний математического
маятника являются:
.
Наличие внутренней силы, препятствующей
его смещению из положения равновесия
и заставляющей его снова возвращаться
в положение равновесия.
2.Инертность
маятника, благодаря которой он, сохраняя
свою скорость,
не останавливается в положении равновесия,
а проходит через него дальше.
Период
свободных колебаний математического
маятника – минимальный промежуток
времени, по истечении которого система
возвращается в прежнее состояние, не
зависит от его массы, а определяется
лишь длиной нити и ускорением свободного
падения в том месте, где находится
маятник:
1. Какими величинами характеризуется колебательное движение?
Колебательное движение характеризуется амплитудой, частотой (или периодом) и фазой.
2. Что называется амплитудой колебания; периодом колебания: частотой колебания? Какой буквой обозначается и в каких единицах измеряется каждая из этих величин?
а) Наибольшее (по модулю) отклонение колеблющегося тела от положения равновесия называется амплитудой колебаний.
Амплитуду обозначают буквой А и измеряют в единицах длины – метрах (м), сантиметрах (см) и др.
Амплитуду можно измерять также в единицах плоского угла, например в градусах, поскольку дуге окружности соответствует определенный центральный угол, т. е. угол с вершиной в центре окружности (в данном случае в точке О).
б) Промежуток времени, в течение которого тело совершает одно полное колебание, называется периодом колебаний.
Период колебаний обозначается буквой Т и в СИ измеряется в секундах (с).
в) Число колебаний в единицу времени называется частотой колебаний.
Обозначается частота буквой v («ню»).
За единицу частоты принято одно колебание в секунду.
Эта единица в честь немецкого ученого Генриха Герца названа герцем (Гц).
3. Что такое одно полное колебание?
Колеблющееся тело совершает одно полное колебание, если от начала колебаний проходит путь, равный четырем амплитудам.
4. Какая математическая зависимость существует между периодом и частотой колебания?
Период колебания Т и частота колебаний v связаны следующей зависимостью:

5. От чего зависят частота (и период колебаний) нитяного и пружинного маятника?
а) Частота и период свободных колебаний нитяного маятника зависят от длины его нити.
Чем больше длина нити маятника, тем больше период колебаний и меньше частота.
б) Частота свободных колебаний пружинного маятника зависит от массы груза и жесткости пружины.
Чем больше масса пружинного маятника, тем больше период колебаний и меньше частота.
Чем больше жесткость пружины маятника, тем меньше период колебаний и больше частота.
6. Что называется собственной частотой колебательной системы?
Частота свободных колебаний называется собственной частотой колебательной системы.
Свободные колебания в отсутствие трения и сопротивления воздуха называются собственными колебаниями, а их частота — собственной частотой колебательной системы.
7. Как направлены по отношению друг к другу скорости двух маятников в любой момент времени, если эти маятники колеблются в противоположных фазах? в одинаковых фазах?
а) Если в любой момент времени скорости маятников направлены в противоположные стороны, то колебания маятников происходят в противоположных фазах:

б) Если скорости маятников в любой момент времени направлены одинаково, то маятники колеблются в одинаковых фазах.

Следующая страница – смотреть
18 Понятие колебательного движения.
Период и частота колебаний
Колеба́ния —
повторяющийся в той или иной степени
во времени
процесс изменения состояний системы
около точки равновесия. Например, при
колебаниях маятника
повторяются отклонения его в ту и другую
сторону от вертикального положения;
при колебаниях в электрическом
колебательном
контуре повторяются величина
и направление тока,
текущего через катушку.
Колебания
почти всегда связаны с попеременным
превращением энергии
одной формы проявления в другую форму.
Колебания
различной физической природы имеют
много общих закономерностей и тесно
взаимосвязаны c волнами.
Поэтому исследованиями этих закономерностей
занимается обобщённая теория
колебаний и волн. Принципиальное
отличие от волн: при колебаниях не
происходит переноса энергии, это, так
сказать, «местные» преобразования
энергии.
Выделение
разных видов колебаний зависит от
подчёркиваемых свойств колеблющихся
систем (осцилляторов)
Период
колебаний
и
частота
—
обратные величины;
В
круговых или циклических процессах
вместо характеристики «частота»
используется понятие круговая
(циклическая)
частота

19 Гармонические
колебания. Векторная диаграмма
гармонического колебания. Циклическая
частота, фаза, начальная фаза
Гармоническое
колебание —
явление периодического изменения
какой-либо величины, при котором
зависимость от аргумента имеет характер
функции синуса или косинуса. Например,
гармонически колеблется величина,
изменяющаяся во времени следующим
образом:
x(t)
= Asin(ωt
+ φ)
x(t)
= Acos(ωt
+ φ),

Графики
функций f(x)
= sin(x)
и g(x)
= cos(x)
на декартовой плоскости.
где
х —
значение изменяющейся величины, t —
время, остальные параметры – постоянные:
А —
амплитуда колебаний, ω —
циклическая частота колебаний, (ωt
+ φ) — полная фаза колебаний,

—
начальная фаза колебаний.
Обобщенное
гармоническое колебание в дифференциальном
виде
(Любое
нетривиальное
решение этого дифференциального
уравнения – есть гармоническое колебание
с циклической частотой ω.)
Способ
векторных диаграмм.
Пусть величина х изменяется со временем
по закону
На
плоскости выбирают произвольно
направленную координатную ось Ох.
Из начала координат под углом
равным
начальной фазе колебаний, проводят
вектор
,
модуль которого равен амплитуде
гармонического колебания A (рис. 13.5).
Если вектор
вращается
вокруг точки О с постоянной угловой
скоростью
против
часовой стрелки, то угол
между
вращающимся вектором и осью Ох
в любой момент времени определится
выражением
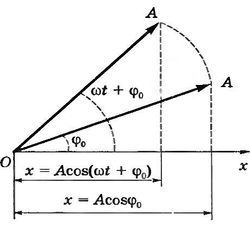
Таким
образом, гармоническое колебание можно
представить проекцией на некоторую
произвольно выбранную ось вектора
амплитуды
,
отложенного от произвольной точки оси
под углом
Циклическая частота
колебний (ω) – число колебаний за 2π
секунд.
–
связь циклической частоты с частотой
колебаний и периодом.
Циклическая
частота в уравнениях колебаний:


циклическая частота колебаний
математического маятника.
то
фаза колебаний определяется как аргумент
периодической функции,
описывающей гармонический колебательный
процесс (ω— угловая
частота
(чем величина выше, тем на большее
значение изменяется угол за ед. времени),
t—
время,
φ0—
(угол в начале колебаний) начальная фаза
колебаний, то есть фаза колебаний в
начальный момент времени t
= 0).
Фаза
обычно выражается в угловых единицах
(радианах,
градусах)
или в циклах
(долях периода):
1
цикл = 2π радиан = 360 градусов.
Строго
говоря, этот термин относится только к
колебаниям, но его также применяют и к
другим периодическим и квазипериодическим
процессам.
20 Гармонические
колебания под действием упругой силы
(вывод закона Гука)
Пружинный
маятник состоит из пружины и массивного
шара, насаженного на горизонтальный
стержень, вдоль которого он может
скользить. Пусть на пружине укреплен
шарик с отверстием, который скользит
вдоль направляющей оси (стержня). На
рис. 7.2,а показано положение шара в
состоянии покоя; на рис. 7.2,б – максимальное
сжатие и на рис. 7.2,в -произвольное
положение шарика.
Под
действием возвращающей силы, равной
силе сжатия, шарик будет совершать
колебания. Сила сжатия F = -kx , где k –
коэффициент жесткости пружины. Знак
минус показывает, что направление силы
F и смещение х противоположны. Потенциальная
энергия сжатой пружины
Для
вывода уравнения движения шарика
необходимо связать х и t. Вывод основывается
на законе сохранения энергии. Полная
механическая энергия равна сумме
кинетической и потенциальной энергии
системы. В данном случае :
Так
как в рассматриваемом движении выполняется
закон сохранения механической энергии,
можно записать:
Но
в свою очередь
.
Интегрируя
это выражение, получим:
–
постоянная интегрирования.
Из
последнего следует, что
Сравнивая
(7.1) с (7.2), получаем
Таким
образом, под действием упругой силы
тело совершает гармонические колебания.
Силы иной природы, чем упругие, но в
которых выполняется условие F = -kx,
называются квазиупругими. Под действием
этих сил тела тоже совершают гармонические
колебания. При этом:
Сила
упругости, возникающая в теле при его
деформации, прямо пропорциональна
величине этой деформации
Для
тонкого растяжимого стержня закон Гука
имеет вид:

Здесь
F — сила натяжения стержня, Δl —
абсолютное удлинение (сжатие) стержня,
а k называется коэффициентом
упругости (или жёсткости).
Коэффициент
упругости зависит как от свойств
материала, так и от размеров стержня.
Можно выделить зависимость от размеров
стержня (площади поперечного сечения
S и длины L) явно, записав коэффициент
упругости как

Величина
E называется Модулем
упругости первого рода или модулем Юнга
и является механической характеристикой
материала.
Если
ввести относительное удлинение

и
нормальное напряжение в поперечном
сечении

то
закон Гука в относительных единицах
запишется как

В
такой форме он справедлив для любых
малых объёмов вещества.
Также
при расчёте прямых стержней применяют
запись закона Гука в относительной
форме

Следует
иметь в виду, что закон Гука выполняется
только при малых деформациях. При
превышении предела
пропорциональности связь между
напряжениями и деформациями становится
нелинейной. Для многих сред закон Гука
неприменим даже при малых деформациях.
21 Циклическая частота
и период колебаний под действием упругой
силы. Энергия колебания.
ЧАСТИЧНО НЕ НАЙДЕНО
При
механических
колебаниях колеблющееся тело (или
материальная точка) обладает кинетической
и потенциальной энергией. Кинетическая
энергия тела W:
(Скорость
тела v
= ds/dt)
Для
вычисления потенциальной энергии тела
воспользуемся самой общей формулой,
связывающей силу и потенциальную энергию
тела в поле этой силы:
где
U – потенциальная энергия, набираемая
(или теряемая) телом, движущимся в силовом
поле F от точки 0 (точки, в которой
потенциальная энергия принимается
равной 0) до точки х.
Для
силы, линейно зависящей от смещения
(как в случае наших механических
маятников, такие силы носят общее
название квазиупругих сил) мы имеем:
1.
Полная механическая энергия тела не
изменяется при колебаниях:
2.
Частота колебаний кинетической и
потенциальной энергии в 2 раза больше
частоты колебаний маятника.
3.
Колебания кинетической и потенциальной
энергии сдвинуты друг относительно
друга по фазе на
(на полпериода). Когда кинетическая
энергия достигает максимума, потенциальная
– минимума (нуля) и наоборот. Энергия при
колебаниях постоянно перекачивается
из потенциальной в кинетическую и
обратно.
В
случае электрических колебаний энергия
в конуре представляет собой сумму
энергии электрического поля, запасенной
между обкладками конденсатора, и энергии
магнитного поля, запасенной в катушке
с индуктивностью. Вычислим обе
составляющие.
Сравнивая
эти формулы, можно сделать следующие
выводы:
1.
Полная энергия в контуре остается
неизменной:
2.
Частота колебаний энергий в 2 раза
превосходит частоту колебаний заряда
и тока в контуре.
3. Электрическая и
магнитная энергии сдвинуты по фазе на
полпериода друг относительно друга;
происходит непрерывное перекачивание
энергии из одной формы в другую и обратно.
Поскольку
в контуре происходят колебания
электрической и магнитной энергий,
электрический колебательный контур
также называют электромагнитным.
22 Сложение одинокого
направленных гармонических колебаний.
Колеблющееся
тело может принимать участие в нескольких
колебательных процессах, тогда следует
найти результирующее колебание, другими
словами, колебания необходимо сложить.
В данном разделе будем складывать
гармонические колебания одного
направления и одинаковой частоты
применяя
метод вращающегося вектора амплитуды,
построим графически векторные диаграммы
этих колебаний (рис. 1). Tax как векторы A1
и A2
вращаются с одинаковой угловой скоростью
ω0,
то разность фаз (φ2
– φ1)
между ними будет оставаться постоянной.
Значит, уравнение результирующего
колебания будет

(1)
В формуле (1) амплитуда А и начальная
фаза φ соответственно определяются
выражениями


23 Колебания физического
маятника.
Физический маятник
— осциллятор,
представляющий собой твёрдое
тело, совершающее колебания
в поле
каких-либо сил
относительно точки, не являющейся
центром
масс этого тела, или неподвижной
оси, перпендикулярной направлению
действия сил и не проходящей через центр
масс этого тела.
Амплитуда колебаний
Помимо частоты и периода важной характеристикой колебаний является амплитуда.
Амплитуда колебаний – это модуль максимального смещения тела от положения равновесия. Другими словами, это расстояние между положением равновесия и крайней точкой траектории маятника. Рассмотрим рисунок 3. На нем изображен уже знакомый вам нитяной маятник. В идеальном случае амплитуду колебаний маятника нужно считать как длину дуги от положения равновесия до крайней точки. Но если мы считаем, что колебания малые – то есть длина нити маятника (l) гораздо больше смещения (S), можно считать, что длина дуги совпадает с длиной отрезка между проекциями положения равновесия и крайней точки на ось ОХ.

Рис.3 – Амплитуда колебаний нитяного маятника
Обычно амплитуда обозначается большой латинской буквой A.
Ход работы
1.
Укрепить на лапку штатива шарик на нити.
2.
Установить длину нити маятника, равной
1 м.
3.
Определить время, за которое маятник
совершает 30 полных колебаний (n) (полное
колебание – это движение маятника туда
и обратно).
4.
Рассчитать период колебаний маятника
по формуле: Т=t/ n. Занести расчёты в
таблицу.
5.
Повторить опыт с длиной маятника 0,5 м и
0,2 м.
6.
Постройте график зависимости периода
свободных колебаний нитяного маятника
от его длины.
7.
Постройте график зависимости частоты
свободных колебаний нитяного маятника
от его длины.
[Править] Период малых колебаний физического маятника
Если
амплитуда колебаний
мала,
то корень в знаменателе эллиптического
интеграла приближенно равен единице.
Такой интеграл легко берется, и получается
хорошо известная формула малых колебаний:
24 Колебания
математического маятника
Математи́ческий
ма́ятник —
осциллятор,
представляющий собой механическую
систему,
состоящую из материальной
точки,
находящейся на невесомой
нерастяжимой
нити или на невесомом стержне
в однородном поле сил тяготения.
Период
малых собственных колебаний
математического маятника длины l
неподвижно подвешенного в однородном
поле тяжести с ускорением
свободного падения
g
равен

Плоский
математический маятник со стержнем —
система с одной степенью
свободы.
Если же стержень заменить на растяжимую
нить, то это система с двумя степенями
свободы со связью. Пример школьной
задачи, в которой важен переход от одной
к двум степеням свободы.
При
малых
колебаниях
физический
маятник
колеблется так же, как математический
с приведённой
длиной.
Колебания
математического маятника описываются
обыкновенным
дифференциальным уравнением
вида

где
ω ― положительная константа, определяемая
исключительно из параметров маятника.
Неизвестная функция x(t)
― это угол отклонения маятника в момент
t
от нижнего положения равновесия,
выраженный в радианах;

,
где L
― длина подвеса, g
― ускорение
свободного падения.
Уравнение малых колебаний маятника
около нижнего положения равновесия
(т. н. гармоническое уравнение) имеет
вид:
Маятник,
совершающий малые колебания, движется
по синусоиде. Поскольку уравнение
движения является обыкновенным ДУ
второго порядка, для определения закона
движения маятника необходимо задать
два начальных условия — координату
и скорость, из которых определяются две
независимых константы:

где
A —
амплитуда
колебаний маятника, θ0 —
начальная фаза
колебаний, ω — циклическая
частота,
которая определяется из уравнения
движения. Движение, совершаемое маятником,
называется гармоническими
колебаниями
Для
маятника, совершающего колебания с
большой амплитудой, закон движения
более сложен:


он
является периодической функцией, при
малых


—
энергия маятника в единицах t−2.
Период
колебаний нелинейного маятника
где
K — эллиптический интеграл первого
рода.
Движение
маятника по сепаратрисе является
непериодическим. В бесконечно далёкий
момент времени он начинает падать из
крайнего верхнего положения в какую-то
сторону с нулевой скоростью, постепенно
набирает её, и останавливается,
возвратившись в исходное положение.
25 Затухающие колебания.
Зависимость амплитуды от времени.
Затухающие колебания —
колебания, энергия которых уменьшается
с течением времени. Бесконечно длящийся
процесс вида

в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил сопротивления
среды, наиболее часто выражаемых линейной
зависимостью от скорости колебаний

Пускай
имеется система, состоящая из пружины
(подчиняющейся закону
Гука), один конец которой жёстко
закреплён, а на другом находится тело
массой m. Колебания совершаются в
среде, где сила сопротивления
пропорциональна скорости с коэффициентом
c (см. вязкое
трение).
Тогда
второй
закон Ньютона для рассматриваемой
системы запишется так:
где
Fc — сила сопротивления,
Fy — сила упругости
Fc
= − cv, Fy = − kx, то
есть
ma + cv
+ kx = 0
или
в дифференциальной форме
где
k — коэффициент упругости в законе
Гука, c — коэффициент
сопротивления, устанавливающий
соотношение между скоростью движения
грузика и возникающей при этом силой
сопротивления.
Для
упрощения вводятся следующие обозначения:

Величину
ω называют собственной частотой системы,
ζ — коэффициентом затухания.
Тогда
дифференциальное уравнение принимает
вид

Сделав
замену x = eλt,
получают характеристическое
уравнение

Корни
которого вычисляются по следующей
формуле

Определения
Момент
инерции относительно оси,
проходящей через точку подвеса:
В самом широком смысле, колебательное движение – это любое движение, повторяющееся с течением времени. Например, птица, машущая крыльями вверх-вниз, совершает ими колебательные движения. Ребенок, качающийся на качелях, тоже совершает колебательные движения. Игла швейной машины при шитье – тоже.
Но как же так, ведь в названных примерах тела движутся абсолютно по-разному? Крылья птицы и игла швейной машины движутся вертикально вверх-вниз (прямолинейно), ребенок на качелях движется горизонтально и по дуге (криволинейно). Это все неважно. Главный признак колебательного движения – его повторяемость через определенный промежуток времени, то есть через период колебаний.
Свободные колебания
Сравним две ситуации:
1. Родитель толкает качели, на которых сидит ребенок, а потом просто наблюдает, как качели качаются сами по себе.
2. Родитель толкает качели с ребенком, а потом при каждом цикле движения подталкивает качели, поддерживая качания.
Физики говорят, что в первом случае система (качели и ребенок) совершает свободные колебания, то есть колебания под действием только внутренних сил. После выведения системы из равновесия (то есть толчка родителя) к ней больше не прикладывают внешних сил. Во втором случае говорят, что система совершает вынужденные колебания – то есть колебания, под действием периодического внешнего воздействия.
Поговорим о свободных колебаниях. Для простоты рассмотрим систему, состоящую из маленького тяжелого шарика на длинной крепкой нити. Такая система называется нитяным маятником (рисунок 2).

Рис.2 – Нитяной маятник
Без воздействия внешних сил шарик будет находиться в положении 1. Такое состояние называется положением равновесия. Далее к шарику прикладывают силу, направленную влево и он начинает совершать колебания. Траектория шарика будет: 1-2-1-3-1 (см. рисунок 1).
Как при этом будет меняться скорость тела? Для того, чтобы рассмотреть подробно, нужно помнить определения потенциальной и кинетической энергии*, а также в чем заключается закон сохранения энергии (систему считаем замкнутой – потерь энергии не происходит, а, значит, закон сохранения энергии выполняется – энергия колебательной системы остается постоянной):
При движении от точки 1 в 3 будет происходить то же самое, что и при движении из 1 в 2 – предлагаем описать процесс изменения величин (скорости и энергии) самостоятельно.
Если обобщить все сказанное, можно сделать вывод: при колебаниях в положении равновесия кинетическая энергия тела максимальна, а потенциальная минимальна (или равна нулю, в зависимости от выбранной точки отсчета). В крайних положениях потенциальная энергия максимальна, а кинетическая равна нулю. То есть положение равновесия маятника – это такое положение, в котором его потенциальная энергия минимальна (или равна нулю, в зависимости от точки отсчета). При удалении маятника от положения равновесия кинетическая энергия будет уменьшаться, а потенциальная увеличиваться.
*Потенциальная энергия тела зависит от его положения в пространстве; кроме того, это относительная величина – она зависит от того, какая точка отсчета выбрана.
Кинетическая энергия зависит от модуля скорости тела.
Гармонические колебания
«Физика – 11 класс»
Ускорение — вторая производная координаты по времени.
Мгновенная скорость точки – это производная координаты точки по времени.
Ускорение точки — это производная ее скорости по времени, или вторая производная координаты по времени.
Поэтому уравнение движения маятника можно записать так:

где х” — вторая производная координаты по времени.
При свободных колебаниях координата х изменяется со временем так, что вторая производная координаты по времени прямо пропорциональна самой координате и противоположна ей по знаку.
Из математики: вторые производные синуса и косинуса по их аргументу пропорциональны самим функциям, взятым с противоположным знаком, и никакие другие функции таким свойством не обладают.
Поэтому:
Координата тела, совершающего свободные колебания, меняется с течением времени по закону синуса или косинуса.

Периодические изменения физической величины в зависимости от времени, происходящие по закону синуса или косинуса, называются гармоническими колебаниями.
Амплитудой гармонических колебаний называется модуль наибольшего смещения тела от положения равновесия.
Амплитуда определяется начальными условиями, а точнее энергией, сообщаемой телу.
График зависимости координаты тела от времени представляет собой косинусоиду.
х = xm cos ω0t

Тогда уравнение движения, описывающее свободные колебания маятника:

Период и частота гармонических колебаний.
При колебаниях движения тела периодически повторяются.
Промежуток времени Т, за который система совершает один полный цикл колебаний, называется периодом колебаний.
Частота колебаний – это число колебаний в единицу времени.
Если одно колебание совершается за время Т, то число колебаний за секунду

В Международной системе единиц (СИ) единица частоты называется герцем (Гц) в честь немецкого физика Г. Герца.
Число колебаний за 2π с равно:

Величина ω0 — это циклическая (или круговая) частота колебаний.
Через промежуток времени, равный одному периоду, колебания повторяются.
Частоту свободных колебаний называют собственной частотой колебательной системы.
Часто для краткости циклическую частоту называют просто частотой.
Зависимость частоты и периода свободных колебаний от свойств системы.
1. для пружинного маятника
Собственная частота колебаний пружинного маятника равна:
Она тем больше, чем больше жесткость пружины k, и тем меньше, чем больше масса тела m.
Жесткая пружина сообщает телу большее ускорение, быстрее меняет скорость тела, а чем тело массивнее, тем медленнее оно изменяет скорость под влиянием силы.
Период колебаний равен:

Период колебаний пружинного маятника не зависит от амплитуды колебаний.
2. для нитяного маятника
Собственная частота колебаний математического маятника при малых углах отклонения нити от вертикали зависит от длины маятника и ускорения свободного падения:

Период же этих колебаний равен:

Период колебаний нитяного маятника при малых углах отклонения не зависит от амплитуды колебаний.
Период колебаний возрастает с увеличением длины маятника. От массы маятника он не зависит.
Чем меньше g, тем больше период колебаний маятника и, следовательно, тем медленнее идут часы с маятником. Так, часы с маятником в виде груза на стержне отстанут за сутки почти на 3 с, если их поднять из подвала на верхний этаж Московского университета (высота 200 м). И это только за счет уменьшения ускорения свободного падения с высотой.
Механические колебания. Физика, учебник для 11 класса – Класс!ная физика
Свободные, затухающие и вынужденные колебания —
Условия возникновения свободных колебаний. Математический маятник —
Динамика колебательного движения. Уравнение движения маятника —
Гармонические колебания —
Фаза колебаний —
Превращение энергии при гармонических колебаниях —
Вынужденные колебания. Резонанс —
Примеры решения задач —
Краткие итоги главы
Величины, характеризующие колебательное движение
Ранее рассматривались такие характеристики колебаний, как период, частота и амплитуда. Помимо этих величин, колебания характеризуются фазой колебаний.
Фаза колебаний
На рисунке 7 изображен график зависимости смещения от времени при гармонических колебаниях. Такой график называется синусоидой (косинусоидой). В общем случае уравнение зависимости координаты Х от времени t будет выглядеть так:

Разность фаз
Понятие «разность фаз» применяется, когда мы хотим сравнить движение двух маятников. Пусть маятник 1 и маятник 2 двигаются по законам соответственно:

Найдем разность фаз колебаний этих двух маятников.
Если взять конкретный момент времени , фаза гармонических колебаний каждого из маятников в этот момент времени будет:


– это начальные фазы колебания первого и второго маятников соответственно. Эти величины являются начальными условиями, и они не изменяются во время движения, следовательно, при одинаковой частоте колебаний маятников разность фаз остается постоянной.
ЕГЭ профильный уровень. №8 Рациональные уравнения и неравенства. Задача 22
Так как амплитуда колебаний A(ω) должна превосходить величину А0 не более чем на 12,5%, то должно выполняться неравенство:
Следовательно, максимальная частота ω = 120 с-1.
Колебательные системы
Для того, чтобы рассмотреть колебательные движения подробнее, рассмотрим несколько колебательных систем, на примере которых будет рассматривать все закономерности.
В общем случае маятник – это система, способная совершать колебания под действием каких-либо сил, например, сил трения, упругости, тяжести.
2. Пружинный маятник
Пружинный маятник – это система, состоящая из упругой пружины, один конец которой закреплен, а на другой прикреплен груз.
Такой маятник может быть вертикальным (рисунок 4а), тогда колебания будут совершаться под действием сил тяжести и упругости; и горизонтальным (рисунок 4б), тогда на груз будут действовать сил упругости и трения.

Рис.4 – Пружинный маятник
Для пружинного маятника справедливы формулы:

где T –период колебаний пружинного маятника; π ~ 3.14; m–масса груза;k–коэффициент жесткости пружины; – частота колебаний пружинного маятника.
*Ранее говорилось, что существует такая характеристика, как циклическая частота. Формула для ее нахождения будет выглядеть так:

3. Нитяной маятник
Этот вид маятника уже рассматривался ранее (см. рисунок 3), он состоит из длинной нити и тяжелого грузика, подвешенного на ней.
Для нитяного маятника справедливы формулы:

где T – период колебаний нитяного маятника; π ~ 3.14; l –длина нити; g – ускорение свободного падения (~9,8 м/с2), v – частота колебаний.
Интересно отметить, что период нитяного маятника и, следовательно, его частота не зависят от массы грузика, прикрепленного к нити.
*Следует отметить, что все приведенные формулы справедливы только для малых колебаний.
** Циклическая частота нитяного маятника:

Контрольные вопросы
1.
Что такое математический маятник?
2.
В каком случае анализ свободных колебаний,
совершаемых математическим маятником,
значительно упрощается?
3.
Каковы причины свободных колебаний,
совершаемых математическим маятником?
4.
Что такое период свободных колебаний?
Амплитуда колебаний маятника зависит
27974. Амплитуда колебаний маятника зависит от частоты вынуждающей силы, определяемой по формуле
ω — частота вынуждающей силы (в с–1)
А0 — постоянный параметр
ωр = 360с–1 — резонансная частота.
Найдите максимальную частоту ω, меньшую резонансной, для которой амплитуда колебаний превосходит величину А0 не более чем на 12,5%. Ответ выразите в с–1.
Сказано, что амплитуда колебаний Аω превосходит величину А0 не более, чем на 12,5%. Это означает, что Аω числа равного 112,5% от
Как выразить 112,5% от числа А0?
– 100%
х – 112,5%
Значит можем записать:
Подставим данные и найдём ω:
Величина А0 постоянная и положительная, поэтому знак неравенства не изменится:
Знак модуля можно снять, так как в условии сказано, что ω < ωр (это означает, что их разность положительна):
Используя этот сайт, Вы соглашаетесь с тем, что мы сохраняем и используем файлы cookies, а также используем похожие технологии для улучшения работы сайта.
Вынужденные колебания
В реальных (неидеальных) системах колебания всегда нужно поддерживать внешним воздействием.
Под действием периодической внешней изменяющейся силы возникают вынужденные колебания.
Внешняя сила, заставляющая систему совершать колебания, называется вынуждающей силой.
Так как эта сила периодическая, необходимо ввести частоту вынуждающей силы. А чтобы не запутаться, частоту свободных колебаний называют собственной частотой системы. Как показывают эксперименты, даже если изначально собственная частота системы и частота вынуждающей силы отличались, через некоторое время система начинает колебаться с частотой вынуждающей силы. В таких случаях говорят об установившихся вынужденных колебаниях.
Если частота вынуждающей силы равна собственной частоте системы, возникает резонанс – резкое увеличение амплитуды колебаний.
[Править] Центр качания физического маятника
Центр
качания — точка, в которой надо
сосредоточить всю массу физического
маятника, чтобы его период колебаний
не изменился.
Поместим
на луче,
проходящем от точки подвеса через центр
тяжести точку на расстоянии
от
точки подвеса. Эта точка и будет центром
качания маятника.
Действительно,
если всю массу сосредоточить в центре
качания, то центр качания будет совпадать
с центром масс. Тогда момент инерции
относительно оси подвеса будет равен

,
а момент
силы тяжести относительно той
же оси

.
Легко заметить, что уравнение движения
не изменится.
Если
физический маятник подвесить за центр
качания, то его период колебаний не
изменится, а прежняя точка подвеса
сделается новым центром качания.
Вычислим
приведенную длину для нового маятника:
Совпадение
приведённых длин для двух случаев и
доказывает утверждение, сделанное в
теореме.
Для
того, чтобы найти период колебаний
физического маятника, необходимо решить
уравнение качания. Для этого умножим
левую часть этого уравнения на
,
а правую часть на

Интегрируя
это уравнение, получаем.

произвольная
постоянная. Её можно найти из граничного
условия, что в моменты


.
Подставляем и преобразовываем получившееся
уравнение:
Отделяем
переменные и интегрируем это уравнение:
Удобно
сделать замену переменной, полагая


—
полный
нормальный эллиптический интеграл
Лежандра 1-го рода.
При решении задач часто используется не нитяной маятник, а его упрощенная модель – математический маятник. Это идеальная колебательная система, в которой нить считается очень длинной по сравнению с амплитудой колебаний и размерами грузика; сам груз достаточно тяжелым, чтобы пренебречь массой нити. Кроме того, считается, что не происходит потерь энергии.
Рассмотрим подробно, какие силы действуют на такую систему. В первую очередь, на грузик действует сила тяжести mg, направленная вниз (см. рисунок 5). Так же на него действует сила натяжения со стороны нити F, она направлена вдоль нити. Обозначим угол, на который смещается тело от положения равновесия.

Рис.5 – Силы, действующие на математический маятник
Запишем 2-й закон Ньютона:


Рисунок 6 – Силы, действующие на математический маятник при смещении на угол φ
В случае малых углов sinφ можно считать равным φ. Из геометрического определения синуса:

Тогда в крайней точке 2-й закон Ньютона в проекции на ось OX перепишется следующим образом:

То есть ускорение, с которым движется маятник прямо пропорционально его смещению от положения равновесия. Минус в данном выражении означает, что ускорении направлено в противоположную сторону от смещения.
Интересно заметить, что ускорение грузика, подвешенного к ниточке (а значит и самого маятника), не зависит от его массы. Период колебаний математического маятника тоже не зависит от массы грузика:

В случаях, когда колебания происходят под действием силы, пропорциональной смещению тела от положения равновесия, говорят, что тело совершает гармонические колебания.*
График зависимости смещения от времени при гармоническом колебательном движении представляет собой синусоиду или косинусоиду (см. рисунок 7).
Для лучшего понимания, почему график выглядит именно так, можно посмотреть урок в курсе алгебры «Тригонометрические функции»:

Рис. 7 – График зависимости смещения (x) от времени (t) при гармонических колебаниях
На графическом представлении колебаний (рисунок 7) удобно находить период и амплитуду гармонических колебаний.
*Могло сложиться впечатление, что гармонические колебания может совершать только математический маятник. Это не так. Любое тело может совершать колебания, близкие к гармоническим (нужно учитывать не идеальность систем). Например, можно говорить о гармонических колебаниях пружины, если она достаточно жесткая, чтобы она деформировалась упруго, а колебания совершаются с небольшой амплитудой.
Затухающие колебания
Во всех рассмотренных ранее случаях считалось, что на колеблющуюся систему не действуют силы извне. На самом деле, идеальных систем не существует, поэтому любой маятник во время движения будет преодолевать внешние силы сопротивления и терять энергию. Например, пружинный маятник (рисунок 8) будет преодолевать силу трению о поверхность.

Рисунок 8 – Пружинный маятник на шероховатой поверхности
Колебания, энергия которых уменьшается с течением времени, называются затухающими.
Амплитуда затухающих колебаний уменьшается со временем. График таких колебаний изображен на рисунке 9.

Рисунок 9 – График зависимости координаты от времени при затухающих колебаниях
Период и частота колебаний
Период колебаний (T) – это время, за которое тело совершает полный цикл движения, т.е. совершает одно колебание.
В случае с движением крыльев птицы, если считать, что один взмах начинается с верхней точки, полным колебанием будет считаться, когда крылья пройдут от верхней точки через середину до нижней и вернутся от нижней точки через середину до верхней (рисунок 1).

Рисунок 1 – Взмах крыльев птицы как пример полного колебания
Период колебаний обозначается латинской буквой T. По определению период – это время, значит, единица измерения периода будет такой же, как и единица измерения времени. В СИ это секунда.
Как же можно вычислить период колебаний?
Самый простой способ – это посчитать количество колебаний и секундомером измерить время, за которое эти колебания были совершены. Например, ребенок на качелях совершает N = 10 колебаний за t = 30 секунд. Нетрудно подсчитать, что время совершения одного полного колебания будет 30/10 = 3 с. Если обобщить, получится формула для нахождения периода колебаний:

где t – время, за которое совершено N колебаний.
Рассмотрим еще одну важную характеристику.
Частота колебаний (ν) – это количество колебаний, совершаемое телом за единицу времени.
Частота колебаний обозначается греческой буквой (читается как «ню»).
Если сравнить определение частоты колебаний с определением периода, можно заметить, что это обратные величины. То есть:

Гц – единица измерения, которую назвали в честь немецкого физика Генриха Герца. При решении задач одинаково часто употребляется и герц, и с-1. Можно употреблять и то, и другое – в зависимости от того, что удобнее при решении конкретной задачи.
Следует так же отметить, что иногда физики пользуются циклической частотой колебаний:

[Править] Дифференциальное уравнение движения физического маятника
Пренебрегая
сопротивлением среды, дифференциальное
уравнение колебаний физического маятника
в поле силы тяжести записывается
следующим образом:

Последнее
уравнение аналогично уравнению колебаний
математического
маятника длиной

.
Величина
называется
приведённой
длиной физического маятника.